


leyu樂魚-當(dāng)鋼鐵俠學(xué)會(huì)“扭腰歪頭殺”,這臺(tái)人形機(jī)器人“武德很充沛”
- 來(lái)源:admin
- 時(shí)間:2025-10-21
于某汽車工場(chǎng),一臺(tái)機(jī)械臂對(duì)于著地上的螺絲釘“宕機(jī)”了 —— 它的直線樞紐關(guān)頭像被焊死的鋼管,彎不下腰、轉(zhuǎn)不了身。隔鄰教員傅可笑又無(wú)奈:鋼鐵俠,撿螺絲還有患上喊“人工救場(chǎng)”......
而近來(lái),天津首款阿童木人形呆板人“天兵一號(hào)”:身高 1.4 米,不僅能哈腰撿螺絲,還有能繞到裝備暗地里插線。
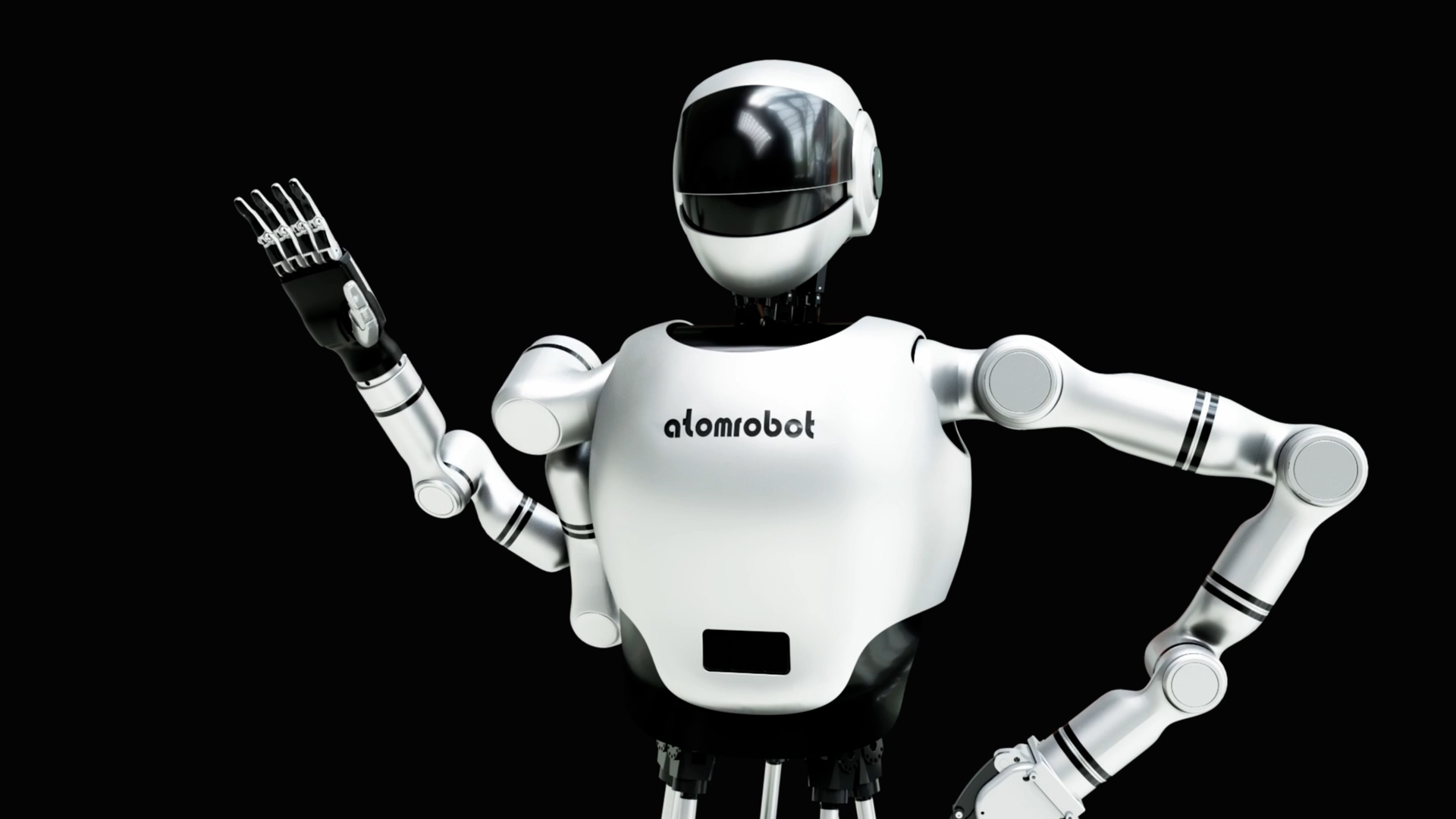
這臺(tái)“武德充沛”的“矯捷小帥”,靠的恰是一套深諳“柔性運(yùn)動(dòng)”之道——37 個(gè)高度仿生樞紐關(guān)頭構(gòu)成的運(yùn)動(dòng)骨架,搭配智能感知體系與柔性節(jié)制算法的組合拳,讓產(chǎn)線老鐵們隱約感觸感染到:當(dāng)呆板人學(xué)會(huì)像人類同樣溫柔發(fā)力,那些讓傳統(tǒng)機(jī)械臂抓瞎的產(chǎn)線柔性化難題,于不遠(yuǎn)的未來(lái),都不叫事兒。
咱們知道,人形呆板人運(yùn)動(dòng)是否柔性,并不是單一技能沖破的成果,而是機(jī)械布局的仿生立異、驅(qū)動(dòng)感知的精準(zhǔn)協(xié)同與智能算法的動(dòng)態(tài)決議計(jì)劃配合作用的產(chǎn)品。
“天兵一號(hào)”于這方面,立異式引入并聯(lián)絡(luò)構(gòu),聯(lián)合仿生布局來(lái)夯實(shí)呆板人的物理基礎(chǔ),用模塊化智能預(yù)留了其進(jìn)化空間。
& 脖子援用超輕量微型并聯(lián)機(jī)構(gòu)設(shè)計(jì),自重不到 1kg,比一袋蘋果還有輕,卻能于Ø110*30妹妹圓柱形空間里,玩出人類頸椎的最終操作:先后俯仰 30°、擺布歪頭 30°,最年夜承重能到6kg,如機(jī)械版貓頭鷹頸椎。
想象一下,當(dāng)它于產(chǎn)線巡檢時(shí),能隨便“歪頭殺”,連裝備頂部的漏洞都看患上明大白白,可謂3D 視角萬(wàn)能擔(dān)任。而這類輕量化(碳纖維等質(zhì)料)與多自由度(仿生構(gòu)型)的聯(lián)合,恰是其矯捷不雅察、快速相應(yīng)的要害。
& 腰部用了6 根航天鋁合金“支鏈肋骨”,構(gòu)成一套過(guò)約束并聯(lián)機(jī)構(gòu)—— 這類布局,亮點(diǎn)于在能蒙受 50kg 的負(fù)載,同時(shí)空間內(nèi)實(shí)現(xiàn)六自由度矯捷運(yùn)動(dòng),扭腰幅度堪廣場(chǎng)舞年夜媽。
這表現(xiàn)了對(duì)于“強(qiáng)度與矯捷性均衡”的尋求,也為繁雜情況下的不變操作及年夜負(fù)載下的柔性調(diào)解提供了充足支撐。
& 它的手臂能像人類同樣繞違抓癢,5 根手指能捏起 0.1妹妹 的芯片,還有自帶12 個(gè)傳感器,摸螺絲力度比女伴侶擰瓶蓋還有精準(zhǔn)。其結(jié)尾履行器的邃密操作,離不開指尖高密度觸覺傳感器的“神經(jīng)末梢”反饋,以和驅(qū)動(dòng)體系的精準(zhǔn)力控能力。
& 讓人不測(cè)的還有有輪式底盤—— 當(dāng)足式人形呆板人學(xué)人類走路摔患上四腳朝天,“天兵一號(hào)”直接開外掛用輪子代步,75m/min 的速率堪比年夜?fàn)旘T電動(dòng)車,穩(wěn)患上一批。
網(wǎng)友辣評(píng):人類進(jìn)化幾百萬(wàn)年才站起來(lái),“天兵一號(hào)”直接躺平用輪子,主打一個(gè)務(wù)實(shí)~ 這類設(shè)計(jì)規(guī)避了雙足行走于繁雜工業(yè)情況中的高能耗及不變性挑戰(zhàn),將能量及算力集中于履行使命自己所需的“上半身柔性”上,是當(dāng)前階段高效落地的聰明選擇。
當(dāng)傳統(tǒng)機(jī)械臂干活仍像被腳本拴住的提線木偶,每一個(gè)動(dòng)作患上靠步伐員提早寫好代碼提詞時(shí),將來(lái)的 “天兵一號(hào)”,于 AI 加持下,將自帶 “職場(chǎng)腦”,擁有強(qiáng)盛的感知體系與進(jìn)步前輩的節(jié)制算法協(xié)同進(jìn)化舉行“柔性運(yùn)動(dòng)”。
以撿螺絲名排場(chǎng)為例:產(chǎn)線上工件失了?“天兵一號(hào)” 0.3 秒內(nèi)相應(yīng)、10秒內(nèi)完成哈腰 - 抓取 - 復(fù)位三連動(dòng)作,比打工人聽見放工鈴的反映還有快。這暗地里是視覺傳感器/深度相機(jī)快速辨認(rèn)方針,內(nèi)部編碼器+IMU及時(shí)感知自身姿態(tài),聯(lián)合逆運(yùn)動(dòng)學(xué)求解及光滑軌跡天生算法,計(jì)劃出最優(yōu)路徑。
對(duì)于比傳統(tǒng)機(jī)械臂 “工件一失就bug等營(yíng)救” 的操作,網(wǎng)友調(diào)侃:一個(gè)是 “被流程捆停止腳的產(chǎn)線 “東西人”,一個(gè)是 “能自立救場(chǎng)自動(dòng)補(bǔ)位的智能 “工友搭子”~
于阿童木呆板人車間,工程師于調(diào)測(cè)“天兵一號(hào)”柔性攥握、哈腰等能力,遇到人其會(huì)主動(dòng)收力,而這,恰是樞紐關(guān)頭扭矩傳感器及柔性節(jié)制算法的功績(jī),讓呆板人能感知接觸力并像彈簧同樣和婉退讓,切合人機(jī)協(xié)作安全尺度。
從 “鋼筋鐵主干粗活” 到 “柔若無(wú)骨做細(xì)活”,“天兵一號(hào)”研發(fā)團(tuán)隊(duì)給它列的這個(gè)“武德進(jìn)階方針”,素質(zhì)是將人類身體的 “生物聰明” 轉(zhuǎn)化為機(jī)械設(shè)計(jì)的 “工程語(yǔ)言”—— 其架構(gòu)設(shè)計(jì),恰是朝著機(jī)械、驅(qū)動(dòng)、感知、節(jié)制、質(zhì)料和仿生學(xué)等多維度體系性整合的標(biāo)的目的邁進(jìn)。
想象下,于不遠(yuǎn)的未來(lái),汽車裝置、3C 周詳制造等工業(yè)場(chǎng)景,“天兵一號(hào)”將像人同樣天然順暢勾當(dāng),能感知輕重、曉得避讓、共同默契......別驚奇,這將是人形呆板人進(jìn)修“人類保存指南”的又一階段性進(jìn)化~
-leyu樂魚 QQ客服
QQ客服
